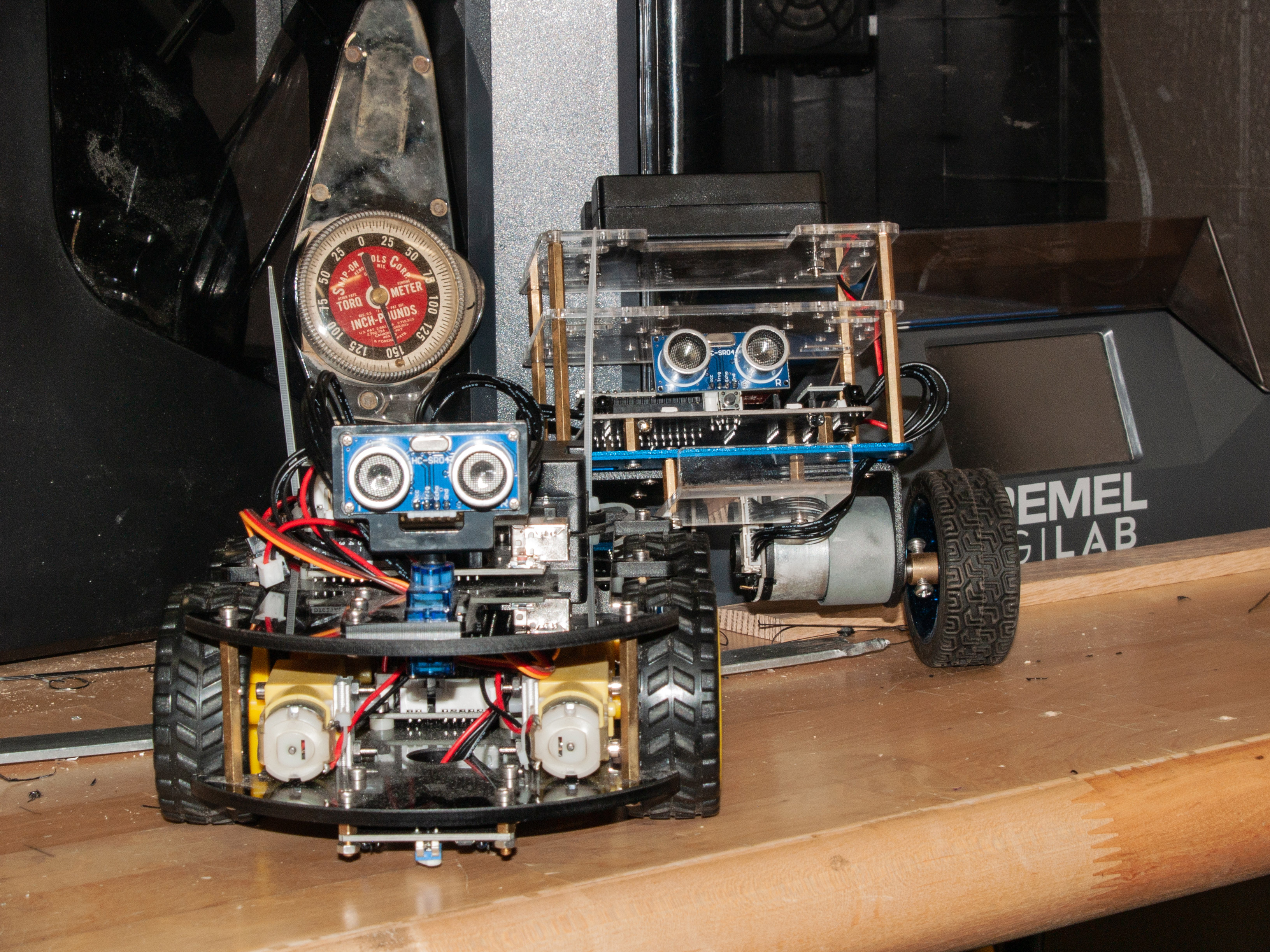
Welcome to the Rosemount Technology Centre's robotics team. We are Rosemech!
Our team comprises students from a variety of programs working together to tackle the many facets of the Moduel challenge. We are drawing on veterans of last year's competition (TakTik) and new recruits, to bring a competitive edge to our robot.
The Automated Systems in Electromechanics team is our largest and most hands-on group of students. They have been building and coding all the electrical components present in the robot. From soldering to coding to troubleshooting they are responsible for animating and bringing “life” to the robot.
Our Design team specializes in CAD software, and are responsible for ensuring the physical elements of the robot are made precisely and will work together. Starting with prototypes the design team worked to incorporate the best ideas from around the club into a final design. They are also responsible for creating technical drawings for fabricating/printing the custom pieces found on the robot.
Our Cabinetmaking team worked to design and manufacture our kiosk
The Machining team fabricated high precision custom pieces out of steel and aluminium used throughout the robot.
The Graphic Design team worked to document the process of building the robot and present it on the website they created. They also designed the logo.


Presenting the hardworking and talented members of the Rosemech Robotics team.

Captain
Captain

Industrial Designer
Electromechanics

Electromechanics

Electromechanics

Electromechanics
Electromechanics
Electromechanics

Cabinetmaking

Cabinetmaking
Cabinetmaking
Welcome to the Moduel 2026's team-based robotic competition. In 2 vs 2 matchups, participating teams will have a five-minute time limit to use the radio-controlled robots they designed, built and programmed to score as many points as possible. Arranged on the pitch are rows of broken engines and spare parts depots. Teams are tasked with collecting game pieces from the depots and inserting them into their broken motor stations in order to repair them. Then with the remaining parts they must stack them into a tower. The teams will be rewarded with points for repaired engines and the height of their tower.
Rosemount Technology Centre is one of the largest English technical career training centres in Quebec. RTC offers full-time career programs – TUITION FREE!
Automated Systems in Electromechanics
Cabinetmaking
Carpentry
Computer Graphics
Furniture Finishing
Industrial Drafting (CAD)
Machining Techniques
Printing
3737 rue Beaubien E, Montréal, QC H1X 1H2
Check out our awesome robotics team, hard at work.
Watch us in action in our introductory video!
.
Our team faced many challenges through the design and construction process. Here are a few examples to highlight.

The Arm
We have a long arm and a lot of torque to contend with. For this reason, we had to use a stepper motor for our first and second arm joints. These motors are very strong but do not provide the smoothness that we need for the precise movements of the arm. To compensate for that we have added a belt and pulley system to our second joint which acts as a reducer and ensures smoother rotation.
Captain
Omnidirectional Wheels
The first challenge our design team overcame was mounting the omnidirectional wheels. For them to work optimally they must be very well aligned and well supported. To do this we used custom precisely machined aluminum extrusion and pillow blocks with bearings, ensuring exact alignment and a smooth ride!
Captain
The Claw
For the game pieces to be inserted into their stations a high level of precision is required. For this reason, we designed a lateral translation system for the claw, using a lead screw actuator. This allows the claw to move parallel to the edge of the station. This way we aren't relying on our major arm joints for high levels of precision.
Industrial Designer
The RTC Robotics Teams